雷达发射的脉冲信号在被目标物体反射回来后,目标回波信号相对于发射信号会产生与距离相关的时间延迟(简称时延),只要脉冲宽度足够窄、间隔足够大,利用时延就可以确定雷达与目标之间的距离。在近距离情况下,考虑到脉冲宽度、脉冲间隔、发射功率和成本等因素,尤其针对汽车防撞雷达一般采用线性调频的连续波雷达。
线性调频连续波雷达发射信号可采用锯齿波调频毫米波信号,信号形式如图1所示。
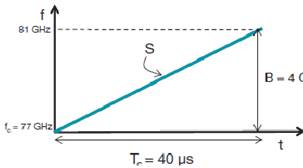

图1 线性调频信号
如图2所示,在雷达与目标相对静止时,目标回波信号与雷达发射信号间的时延对应一定的频率差,频率差就对应雷达与目标间的距离。让回波信号与发射信号进入混频器,通过混频和带通滤波得到差频信号,再利用傅立叶变换得到差频信号的频率值,从而得到相应的距离参数。如果雷达与目标之间有相对运动,相对运动带来的多普勒频移会影响差频信号频率与距离之间的关系,带来测量误差,这称为距离速度耦合问题。通过采用合适的线性调频调制信号波形(一般改用正三角波调频信号)和相应算法,则可以将雷达与目标之间的距离和相对速度分别求出,解决距离速度耦合问题带来的困扰。
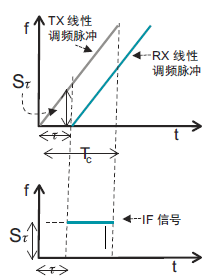
图2 单目标时的中频单音信号
多个目标会带来不同的频差信号,如图3所示。但是在做傅立叶变换求取频差信号频率值时,由于傅立叶变换后频域的旁瓣效应,有时难以准确识别是否存在多个目标。通过选取合适形式的时间窗,则可以一定程度地解决多目标识别问题。
汽车前方目标为行人时,还可以对行人进行步态特征提取和步态识别。每个人在行走时都有各自的动作习惯和特征,通过对回波信号进行时频分析,可以提取出一些特征量,用来实现步态识别。
通过傅立叶变换获取频差信号频率值,都必须采用数字信号处理中快速傅立叶变换(简称FFT)方法来实现,所有的频域分析以及时频处理都采用数字信号处理方法,这就要求对混频之后的频差信号进行A/D变换。

图3 多目标时的多个中频单音信号
本虚拟仿真实验主要包括基于正弦载波信号及线性调频方法的雷达发射信号生成、基于包含路径传输时延和相对运动多普勒频移的目标回波信号生成、基于雷达发射信号与目标回波信号的混频差频信号生成、信号放大与滤波、A/D变换(采样、量化、编码)、窗函数的选取与使用、通过FFT等信息处理方法获取目标距离和相对运动速度以及多目标处理等环节,在每个环节都尽量显示信号的时域波形与频谱结构。
实验内容分为四个层次:一是以雷达发射与接收信号为例,加强学生对信号时域波形、频谱结构、时延、频移、调制、混频和滤波等基本概念的理解和掌握;二是通过对差频信号进行A/D变换,增强对采样定理的理解;三是通过对差频信号的频域处理分析,尤其通过单、多目标情况的处理,增强学生对窗函数的特性了解和应用傅立叶变换进行信号分析和处理的能力。四是通过对人体步态信号的时频域分析的实验,进一步增强学生频域分析的能力。