一、启动
学生可通过远端计算机进行远程访问,进入系统界面、实验场景设置以及实验结果显示界面分别如图1、图2与图3所示。
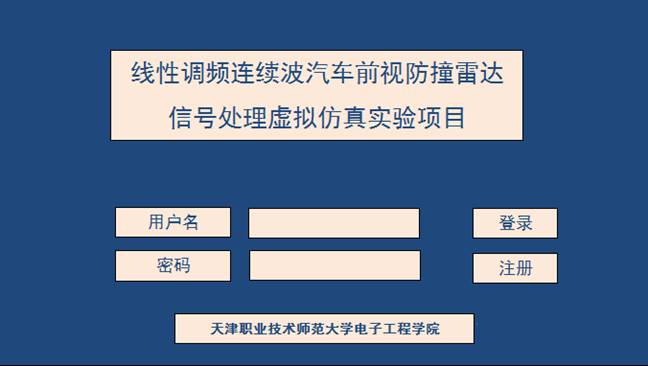
图1 系统进入界面
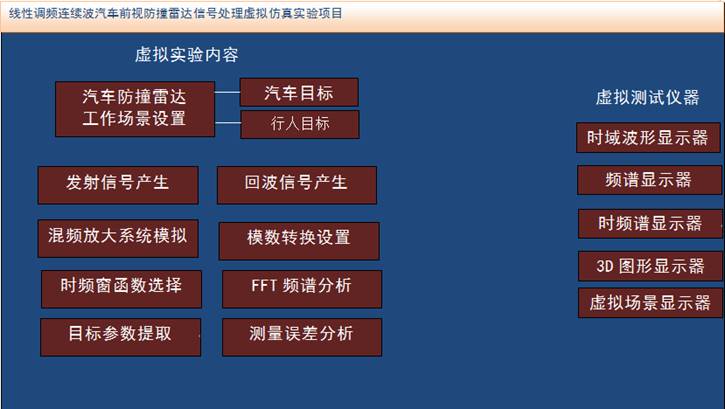
图2 实验场景设置界面
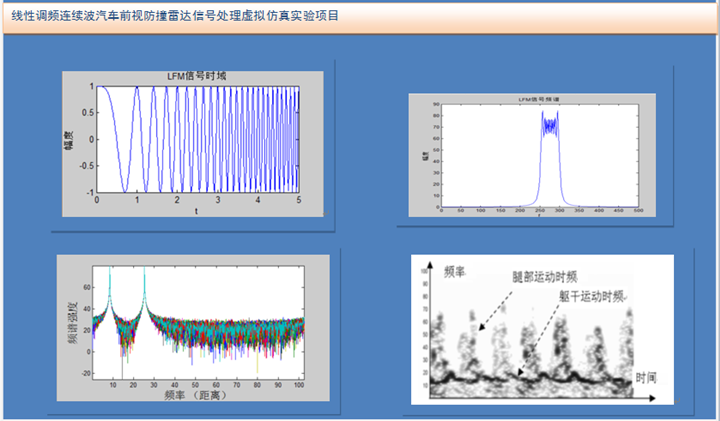
图3 实验结果界面
二、操作
(1)汽车防撞雷达虚拟仿真环境场景的设置:包括雷达静止与运动、单目标静止或运动、多目标静止或运动,组合时应保证至少一方在运动,基本配置场景是雷达静止单目标运动。图4为实际场景的模拟图示,图5为场景参数设置框图。

图4 实际场景模拟图示
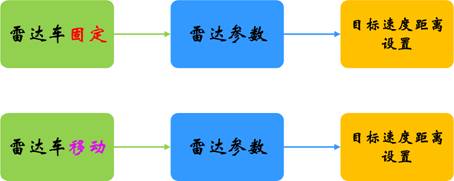
图5 场景参数设置框图
(2)雷达发射信号的虚拟生成与显示:仿真产生77GHz的正弦电磁波,波形分别为斜率可调的锯齿波、三角波的调制信号,通过VCO产生线性调频波,采用波形显示器与频谱显示器分别显示信号时域波形和频谱结构,基本配置是产生三角波调制信号控制的线性调频波。图6为发射信号产生框图。
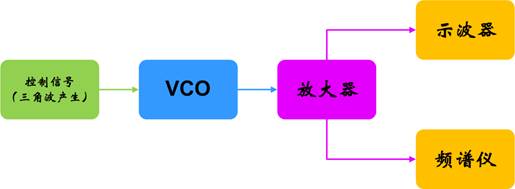
图6 发射信号产生框图
(3)雷达接收回波信号的生成与显示:包括具备在一定范围内可调的时延与对应运动速度的多普勒频移,采用波形显示器与频谱显示器分别显示信号时域波形和频谱结构。图7为回波信号产生框图。
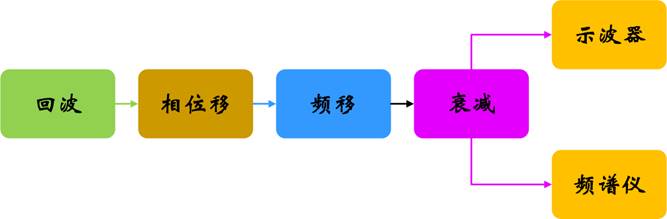
图7 回波信号产生框图
(4)差频信号的生成与显示:采用放大器、混频器和带通滤波器结合得到差频信号,分别在放大器输出端、混频器输出端和滤波器输出端采用波形显示器与频谱显示器显示信号时域波形和频谱结构。图8为发射信号与回波信号的混频、滤波及放大处理框图。
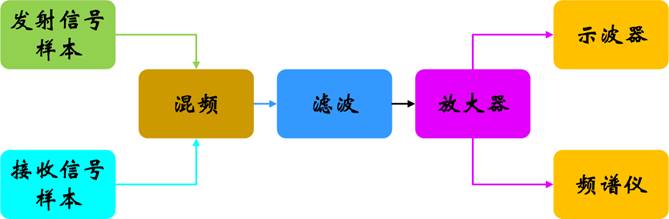
图8 混频滤波放大框图
(5)模数变换过程分析及效果:采样频率设置、量化位数选择、编码方式的选择与实现,采用波形显示器显示采样信号序列与量化后的序列以及误差序列,基本配置给出建议的参数设置。图9为模数变换框图。
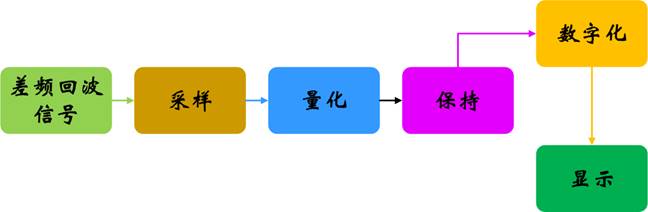
图9 模数变换框图
(6)窗函数选择与显示:选择不同窗函数形式,并显示窗函数波形,以及对应的频谱结构,理出不同窗函数的特点。图10窗函数选择及FFT处理框图。
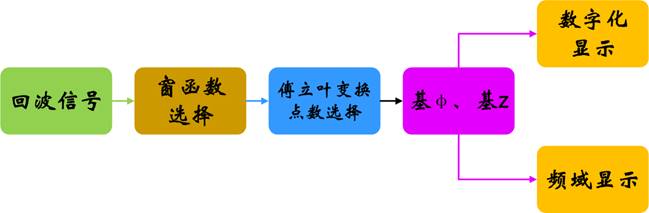
图10 加窗函数及FFT框图
(7)窗函数的作用效果:选择矩形窗、汉明窗等四种窗函数进行信号的频谱分析,突出窗函数的在频谱分析中的效果。
(8)单目标的频域分析:设置单一目标,构建目标回波信号,并且加入噪声,进行频域分析,并得出目标的距离速度值,并且与目标设置值进行对比,求出测量误差。
(9)多目标的频域分析:设置三个目标,构建目标回波信号,并且加入噪声,进行频域分析,并得出目标的距离速度值,并且与目标设置值进行对比,求出测量误差。
(10)不同信噪比下的目标检测:设置单一目标,构建目标回波信号,并且加入不同功率的噪声,形成不同信噪比的回波信号,进行频域分析,并得出目标的距离速度值,并且与目标设置值进行对比,求出测量误差。
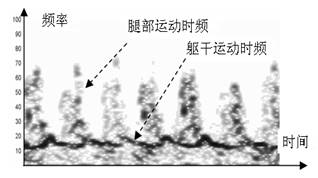
(11)人员步态信号检测:设置汽车前有人行走,通过3D技术设置人体肢体的摆动,设置时频分析函数参数,进行时频谱分析,同时求出人体行走的速度。图11为场景示意图及回波信号视频分析示意图。
图11 人体步态雷达信号识别场景及时频分析结果图
(12)挑战低信噪比下多目标的检测处理:系统预设低信噪比、多个目标存在的情况下,由学生设计处理方法得到目标的距离速度参数,在正确误差范围内为合格。
(13)挑战多波束形成处理测量角度:构建雷达接收4个天线阵列,设置阵列参数,设置雷达目标相互位置关系,得到目标距离、速度、角度数据。